Amazing Hand Pwm Controller
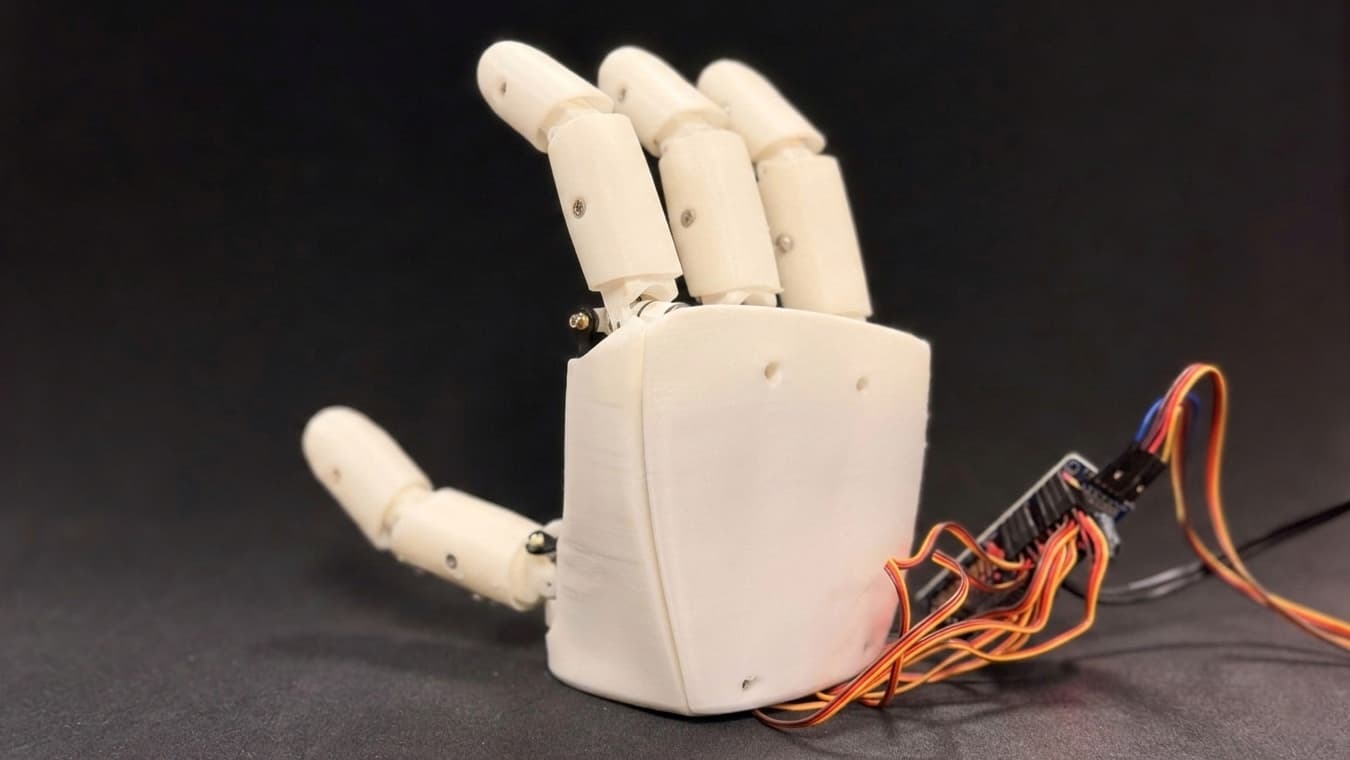
ESP32-Powered Robotic Hand with PWM Servo Control
A custom firmware adaptation for the Amazing Hand by Pollen Robotics — redesigned from the ground up to drive standard PWM servos via an Adafruit PCA9685 driver, controlled by an ESP32 with a built-in web interface.
The Problem
The original Amazing Hand design relies on Feetech SCS0009 serial bus servos, which require a dedicated serial protocol and specific hardware to drive. Replacing them with widely available PDI-1109MG PWM servos makes the build cheaper, more accessible, and easier to source — but requires a completely different control layer.
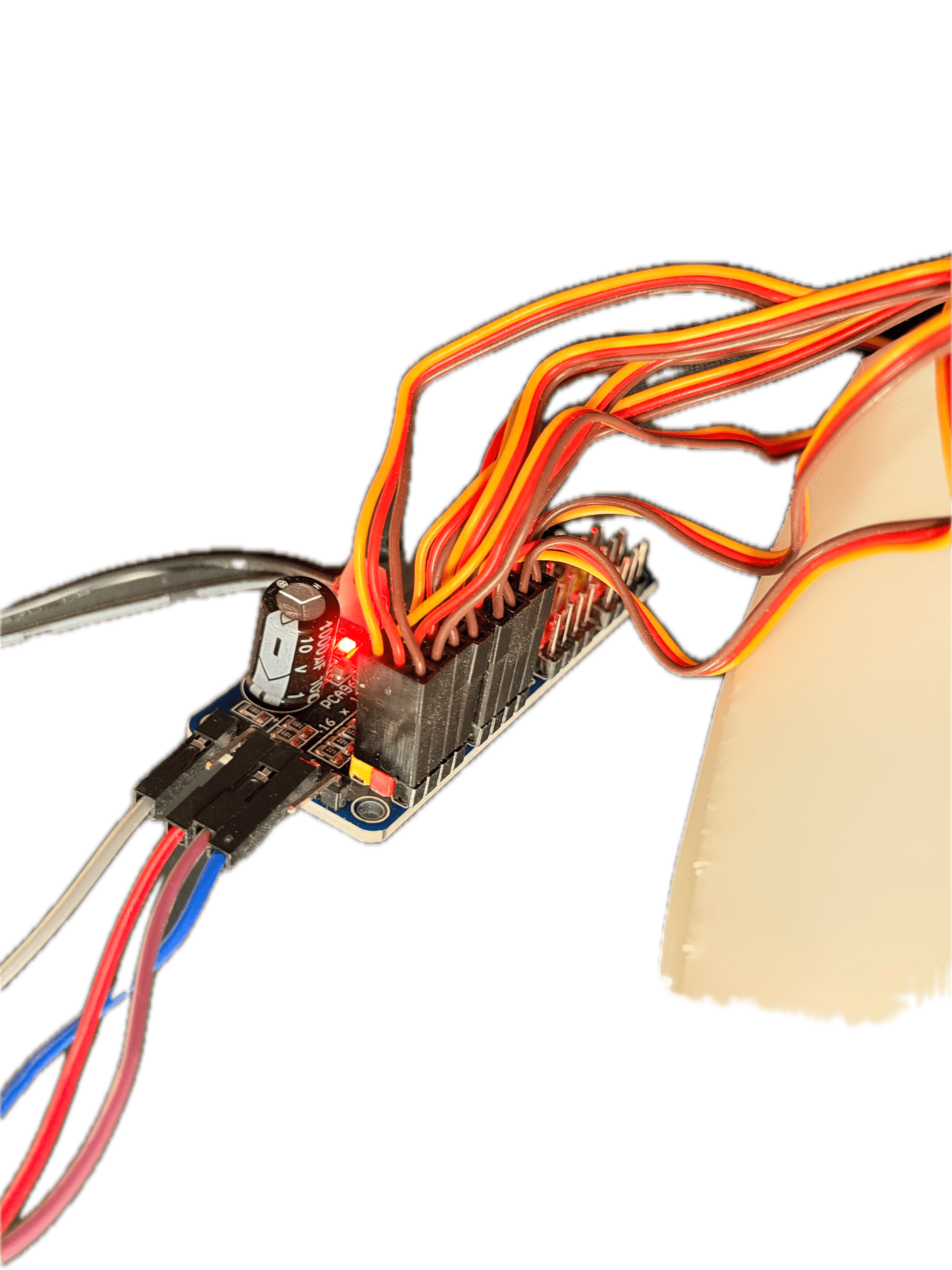
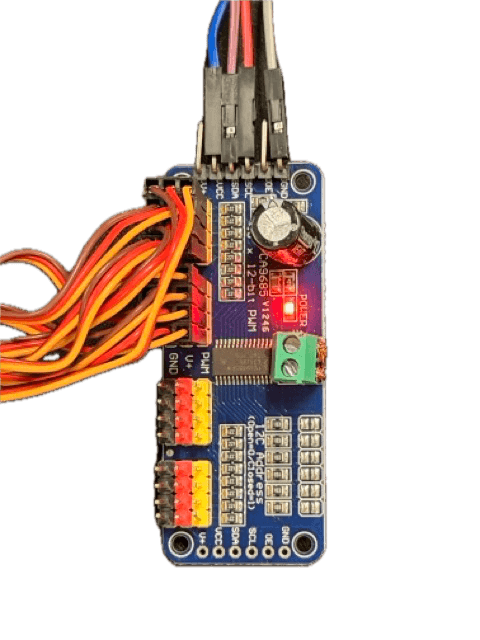
This project replaces the servo driver stack entirely: an ESP32 talks I2C to an Adafruit PCA9685 16-channel PWM board, which in turn drives 8 servos across 4 fingers (2 servos per finger for full flexion control).
Hardware
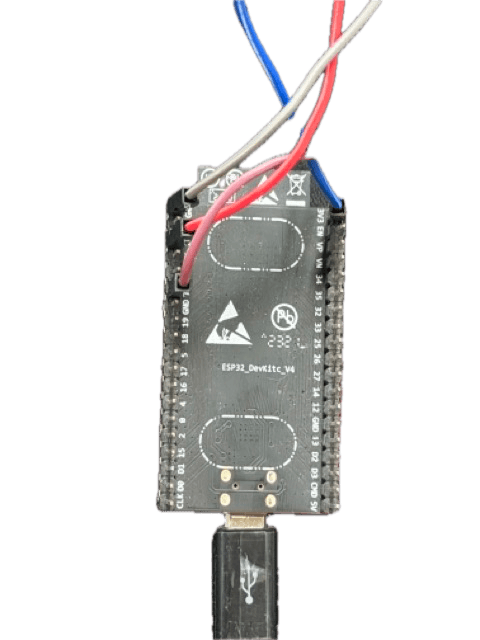
- ESP32 development board
- Adafruit PCA9685 16-channel I2C PWM driver
- 8× PDI-1109MG PWM servos
- 5V / 3-5A external power supply
- Amazing Hand 3D-printed parts (original Pollen Robotics design)
Important: The PCA9685 board must be powered separately from the ESP32. Driving 8 servos from the ESP32's onboard regulator will cause brownouts and unpredictable behavior.

Wiring
The wiring connects the ESP32 to the PCA9685 over I2C, with each servo channel mapped to a specific finger joint.

Software Architecture
The firmware is built with PlatformIO and structured as a modular, non-blocking state machine. No blocking delays — everything runs cooperatively so the system stays responsive during gesture execution, calibration, or web requests.
Key modules:
- ServoController — wraps the PCA9685 library, translates angular positions to PWM pulse widths
- FingerController — manages each finger's two-servo pair, handles joint coordination
- StateManager — tracks the current system mode (idle, gesture, calibration, demo)
- CalibrationManager — reads/writes per-servo min/max calibration data to NVS (non-volatile storage)
- CommandManager — parses serial input at 115200 baud
- WebInterface — serves a browser UI over Wi-Fi for gesture and calibration control
Gestures
Three pre-programmed gestures are available out of the box:
Wave

Rock & Roll
Middle Finger
Gestures can be triggered via the web interface, serial commands, or cycled automatically in demo mode.
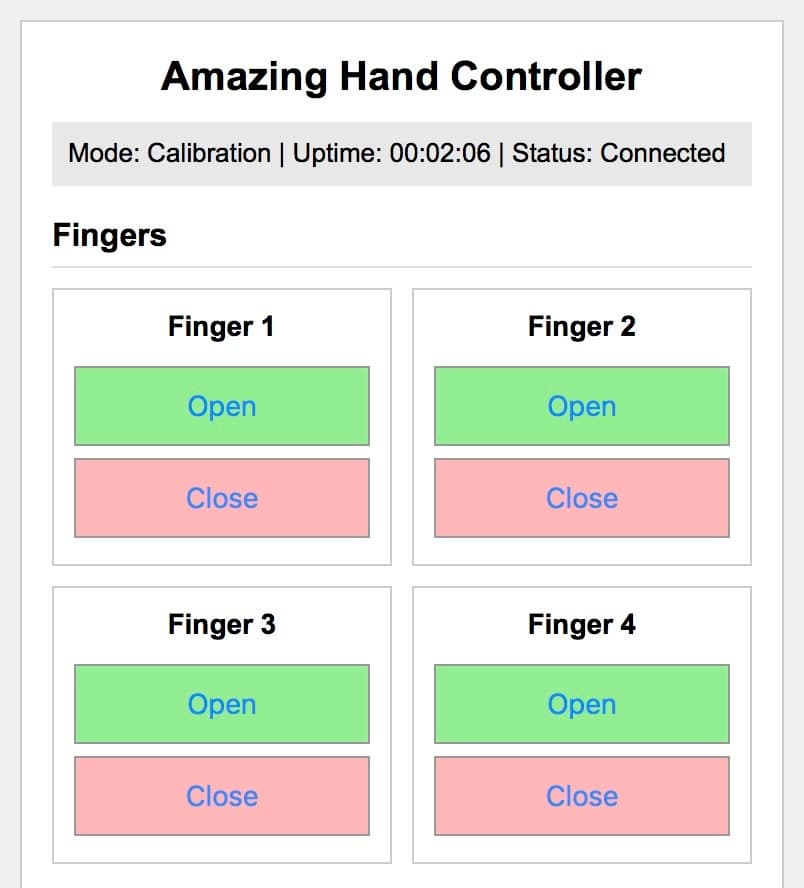
Web Interface
The ESP32 hosts a web server accessible from any browser on the same network. It exposes three panels:
All controls

Gesture shortcuts
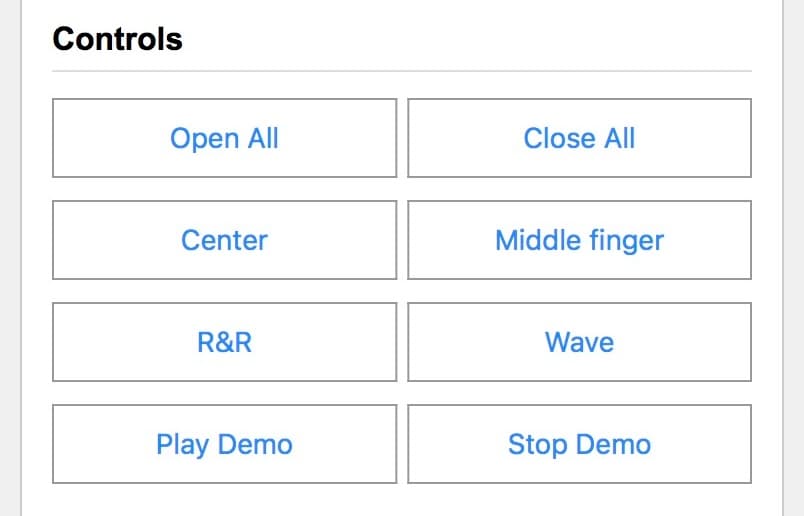
Per-finger sliders
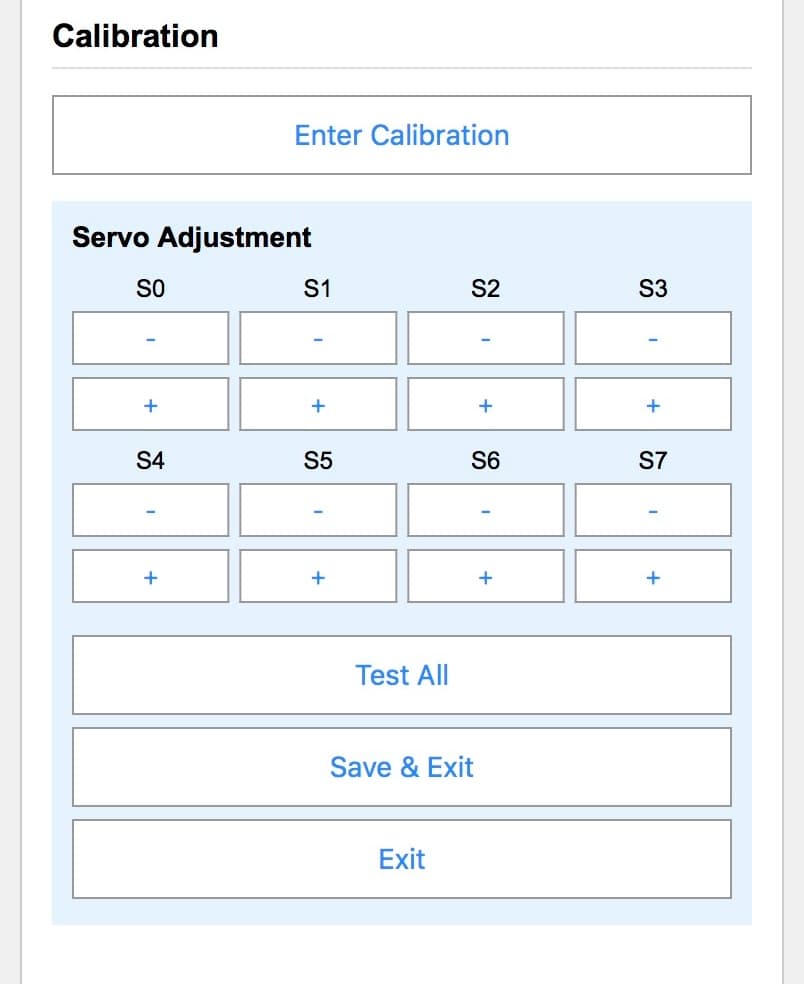
Calibration panel
Each servo's min/max pulse width can be tuned individually and saved to persistent storage — no need to reflash to adjust for mechanical tolerances.
Bill of Materials
| Component | Qty |
|---|---|
| ESP32 development board | 1 |
| Adafruit PCA9685 PWM driver | 1 |
| PDI-1109MG servo | 8 |
| 5V / 3-5A power supply | 1 |
| Amazing Hand 3D-printed parts | 1 set |
Getting Started
Clone the repo and open it in PlatformIO. Build and flash to the ESP32. On first boot, the device creates a Wi-Fi access point — connect to it and navigate to the device IP to open the web interface.
Full setup instructions and serial command reference are in the GitHub repository.