Born in Turin in 1999, I've always been passionate about technology and its potential to improve and simplify our lives. During high school I explored 3D modeling, 3D printing, and industrial automation, experiences that shaped my hands-on approach to building technology. After graduating in ICT, I specialized in developing both native and web applications.
Today I work as a robotics software engineer and full-stack developer, building intuitive interfaces that make complex machines easier to control. I enjoy prototyping and experimenting, turning ideas into interactive systems that improve efficiency, simplify complex tasks, and sometimes are simply beautiful.
For several years I have also taught robotics and automation in high schools. Sharing knowledge is something I truly value, because inspiring and empowering the next generation of innovators is incredibly rewarding.
In my free time I continue experimenting with robotics and 3D printing, bringing ideas to life through practical projects. Alongside my technical work, I've also been involved in social initiatives, including volunteering at the GO oratory in Grugliasco (Turin). I'm constantly learning and exploring how technologies like software development, automation, and DIY can be applied across different fields to create meaningful and practical solutions.
- Precision handling of industrial robots
- Robot programming and configuration
- Motion simulation and validation (RoboGuide)
- Cycle-time analysis and optimization
- Teaching and certification support
- End-to-end ownership of mobile applications (Flutter)
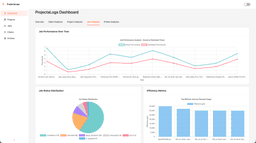
- Web dashboards & NestJS backend integration
- Custom API development & IoT communication (MQTT)
- Industrial robot commissioning and programming (KUKA, ABB)
- Rapid prototyping and 3D fabrication
- Containerized deployments (Docker)
- AI and MCP servers
- ESP32 firmware (C++) & Bluetooth Serial for coin reader hardware
- Fieldbus and I/O communication protocols
- Robot operation, configuration, and programming
- e.DO Learning Lab sessions for hands-on learning
- Teacher training & assessment programs
- Empowering students with practical automation competencies